Perimeter Defense using multi-robot system
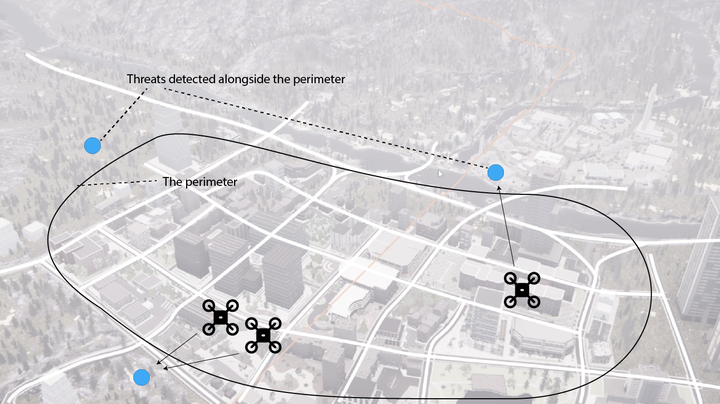 Problem Illustration
Problem Illustration
In this project, we focus on developing strategies for a team of robots to enable them to a defend a given region of interest from external intruders. The defense team is constrained to move along the perimeter of the given region of interest. We intend to explore both heterogenous and homogenous teams in this project.
Ragesh Kumar Ramachandran
Planning and Control Engineer
My research interests include design and analysis of algorithms for solving various problems in Swarm robotic and Multi-robotic systems.