Motion planning on Manifolds
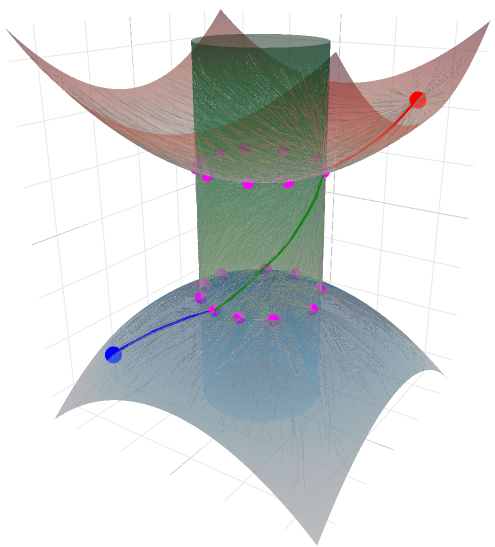 Planning on a Hourglass
Planning on a Hourglass
The project is focussed on applying tools from differential geometry to perform motion planning on a sequence of manifolds which are specified analytically or are learned from data.
Ragesh Kumar Ramachandran
Planning and Control Engineer
My research interests include design and analysis of algorithms for solving various problems in Swarm robotic and Multi-robotic systems.