Resilience in multi-robot system
Jan 27, 2019
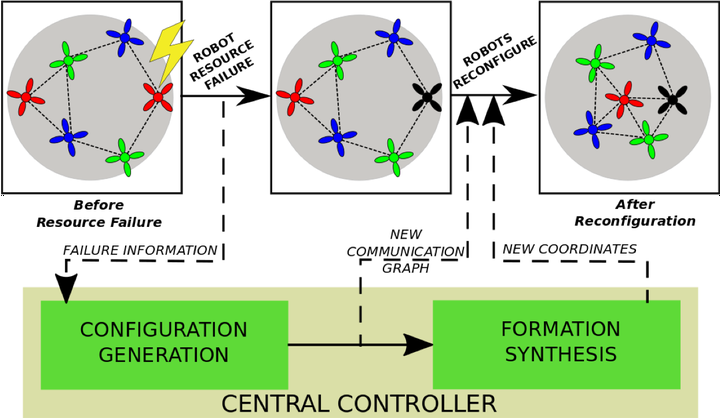 Block diagram
Block diagram
A heterogeneous multi-robot team, where robots have varied sensing, actuation, communication and computational capabilities, is a promising direction to consider when building a resilient team. Such a team can work together by sharing resources between individual robots to perform complex tasks, thereby being resilient to failures of individual robots. We exploit this idea in this project.
Ragesh Kumar Ramachandran
Planning and Control Engineer
My research interests include design and analysis of algorithms for solving various problems in Swarm robotic and Multi-robotic systems.
Publications
Resilient Multi-Robot Multi-Target Tracking
We address the problem of ensuring resource availability in a networked multi-robot system performing distributed target tracking.
Adaptive and Risk-Aware Target Tracking with Heterogeneous Robot Teams
We consider a scenario where a team of robots with heterogeneous sensors must track a set of hostile targets which induce sensory …
Resilient Monitoring in Heterogeneous Multi-robot System through Network Reconfiguration
We propose a framework for resilience in a networked heterogeneous multi-robot team subject to resource failures. Each robot in the …
Resilient Coverage: Exploring the Local-to-Global Trade-off
We propose a centralized control framework to select suitable robots from a heterogeneous pool and place them at appropriate locations …
Resilience in multi-robot multi-target tracking with unknown number of targets through reconfiguration
We address the problem of maintaining resource availability in a networked multi-robot team performing distributed tracking of unknown …
Resilience by Reconfiguration: Exploiting Heterogeneity in Robot Teams
We propose a method to maintain high resource availability in a networked heterogeneous multi-robot system subject to resource …
Resilience in multi-robot target tracking through reconfiguration
We address the problem of maintaining resource availability in a networked multi-robot system performing distributed target tracking